ドローン点検は“事前ルート飛行”から“AIが飛行計画を更新”へ:Adaptive Flight Planningの実務論点
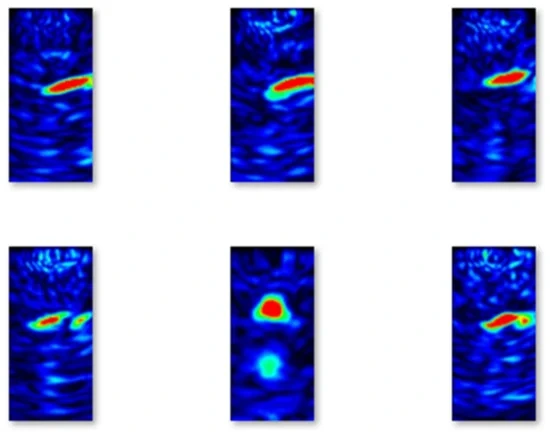
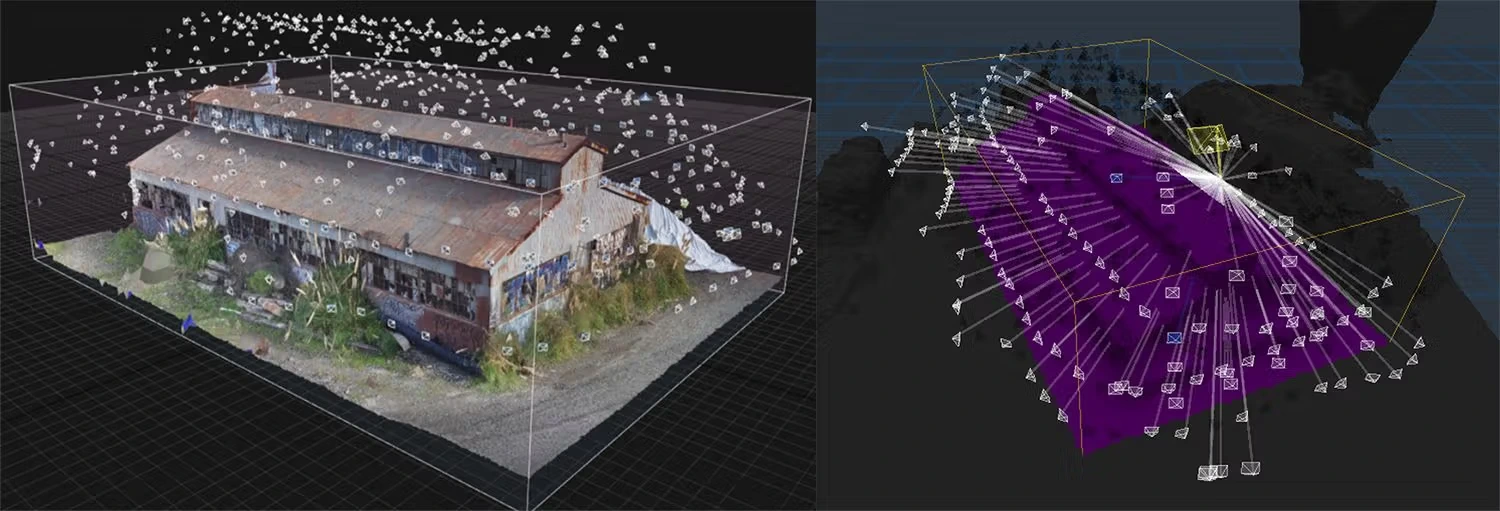
複雑なインフラ点検では、事前に決めた飛行ルートだけでは死角や取得漏れが発生します。Adaptive Flight Planningにより、橋梁下部、港湾、法面、プラント、送電設備などで、AIが撮影状況・欠陥候補・バッテリー・障害物を見ながら飛行計画を更新する次世代ドローン点検を解説します。
ドローン点検は“事前ルート飛行”から“AIが飛行計画を更新”へ:Adaptive Flight Planningの実務論点 続きを読む »