ドローン点検は、これまで「事前に決めたルートを飛び、写真や動画を撮る」運用が中心でした。橋梁、屋根、外壁、法面、プラント、港湾、送電設備などを対象に、操縦者が飛行ルートを作り、一定の高度、速度、撮影間隔で飛行し、取得した画像を後から確認する流れです。
しかし、複雑なインフラ点検では、事前ルートだけでは不十分な場面があります。橋梁下部では桁や支承の裏側が死角になる。プラントでは配管や架台が入り組み、予定した角度では設備裏側が写らない。法面では植生や地形の起伏で、画像や点群の取得漏れが出る。港湾構造物では潮位や係留物によって見える範囲が変わる。送電設備では障害物、電線、風、周辺地形を避けながら、必要な角度で撮影する必要があります。
そこで重要になるのが、Adaptive Flight Planningです。これは、ドローンが単に決められたルートを飛ぶのではなく、取得状況、死角、欠陥候補、障害物、バッテリー残量、風、センサー品質を見ながら、飛行計画を更新する考え方です。
2026年のUAVインフラ点検レビューでは、複雑な環境に対応するため、データ取得、欠陥検出、意思決定支援を統合し、マルチモーダルデータ融合と適応的な飛行計画を進める必要があると整理されています。レビューでは、UAV点検の今後の方向として、軽量AIモデル、合成データ、LiDAR統合、より高速なマルチモーダル融合、そしてAdaptive Flight Planningが挙げられています。
なぜ事前ルート飛行だけでは限界があるのか
事前ルート飛行は、道路、造成地、屋根、太陽光発電所のように、比較的開けた場所では有効です。飛行エリアを設定し、一定の重複率で写真を撮影すれば、オルソ画像や3Dモデルを作成できます。
一方、インフラ点検では、対象物の形状が複雑です。橋梁下部、港湾施設、プラント、送電設備、法面、トンネル坑口、ダム設備などは、単純な格子状ルートでは必要な視点を取りきれない場合があります。
| 事前ルート飛行の課題 | 現場で起こる問題 |
|---|---|
| 死角を事前に把握しにくい | 支承裏、配管裏、桁下、設備背面が撮れない |
| 欠陥候補を見つけても再撮影できない | 後から拡大写真が必要になり再飛行が発生 |
| 風や障害物で予定ルートを飛べない | 取得漏れや画角不足が起こる |
| バッテリーを均等に使えない | 重要箇所の前に帰還が必要になる |
| 撮影品質を飛行中に確認しない | ブレ、露出不足、ピント不良に後から気づく |
| LiDARや熱画像の取得条件を考慮しにくい | 点群密度不足や温度異常の見逃しが起こる |
つまり、複雑な点検では「飛んだかどうか」より、「必要な場所を、必要な角度・距離・解像度・センサー条件で取得できたか」が重要になります。
Adaptive Flight Planningとは何か
Adaptive Flight Planningとは、ドローンが飛行中または飛行前後のデータをもとに、点検ルートを動的に調整する考え方です。従来のドローン点検では、人が事前にルートを設計し、ドローンはそのルートに従って飛びます。Adaptive Flight Planningでは、AIが現場の取得状況や点検目的を評価し、必要に応じて追加撮影、視点変更、接近、迂回、再配分を行います。
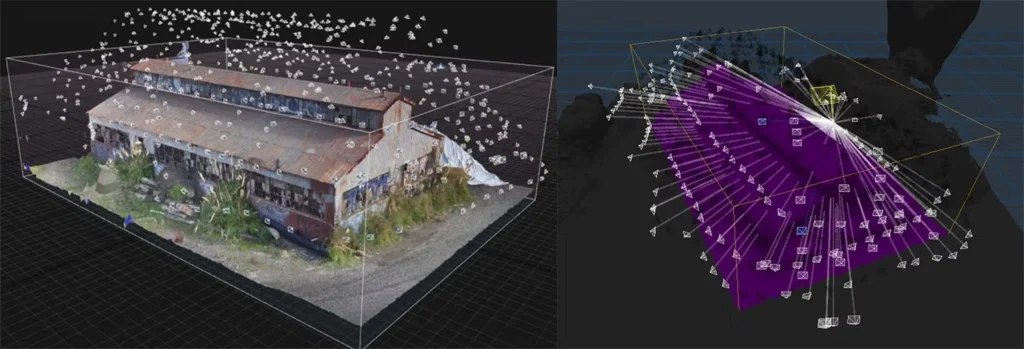
Skydioは、3D Scanについて、複雑な表面のグローバルマップを構築しながら、輪郭に沿うモーションプランニングでデータ取得を行うAdaptive Mappingを説明しています。Skydioのサポート資料でも、3D Captureは複雑な構造物を効率的にスキャンするため、スキャン対象のボリュームを評価し、自律的かつ適応的な飛行パターンを生成すると説明されています。
| 従来の飛行計画 | Adaptive Flight Planning |
| 飛行前に人がルートを固定 | AIが取得状況を見てルートを更新 |
| 格子状・ウェイポイント中心 | 対象物の形状・死角・欠陥候補に合わせる |
| 撮影漏れは後から発覚 | 飛行中または直後に不足箇所を検出 |
| 欠陥候補の追加撮影は別ミッション | 重要箇所をその場で再撮影 |
| バッテリー計画は固定 | 残量と優先度に応じて撮影順序を調整 |
| センサーごとに別運用 | RGB、LiDAR、熱画像の取得条件を統合 |
Adaptive Flight Planningの本質は、ドローンを“飛行するカメラ”から、“点検目的に応じて取得方法を変える移動センサー”へ変えることです。
欠陥検出と飛行計画をつなぐ
Adaptive Flight Planningで重要なのは、欠陥検出と飛行計画を分離しないことです。従来は、ドローンが撮影し、後からAIが欠陥を検出していました。しかし、欠陥候補が見つかった後に再撮影が必要になると、再飛行が増え、点検時間とコストが上がります。
Adaptive Flight Planningでは、飛行中または現場での簡易処理により、AIが欠陥候補を検出し、必要に応じて追加撮影を行います。
| AIが検出する状況 | 飛行計画の更新例 |
| ひび割れ候補を検出 | 接近して高解像度画像を追加取得 |
| 錆・腐食候補を検出 | 角度を変えて反射・影の影響を確認 |
| 熱異常を検出 | RGB画像と位置情報を追加取得 |
| 点群密度が不足 | 低速飛行または別角度から再取得 |
| 死角が残る | 側面・下部・斜め方向の追加ルートを生成 |
| 画像ブレを検出 | 同一箇所を再撮影 |
| 障害物を検出 | 迂回しながら代替視点を探索 |
UAV点検と管理に関する研究では、Transformerベースのマルチモーダルデータ融合で欠陥認識を強化し、深層強化学習で動的な経路計画を行い、点検カバレッジとエネルギー効率を高める枠組みが提案されています。
つまり、今後のドローン点検では、AI欠陥検出は「後処理」だけでなく、「飛び方を変える判断材料」になります。
橋梁下部では“見えない角度”を減らす
橋梁点検では、橋面上から見える範囲だけでなく、床版下面、桁、支承、橋脚、排水設備、伸縮装置周辺などを確認する必要があります。特に橋梁下部は、構造が複雑で、ドローンの飛行空間も限られます。GPSが不安定になりやすく、桁や橋脚が障害物になるため、事前ルートだけでは十分な撮影が難しい場合があります。
Adaptive Flight Planningでは、橋梁の3Dモデルや点群を使い、見えていない面や撮影角度が不足している部材を検出します。そのうえで、バッテリー残量と安全距離を考慮しながら、追加撮影ルートを生成します。
| 橋梁点検の課題 | Adaptive Flight Planningでの対応 |
| 床版下面の死角 | 取得済み視点を解析し、未撮影面を追加取得 |
| 支承周辺の狭小空間 | 安全距離を保った接近ルートを生成 |
| 桁下のGPS不安定 | ビジョン・LiDAR・SLAMを使った局所飛行 |
| ひび割れ候補 | 接近撮影と斜め方向からの再撮影 |
| 画像ブレ | 飛行速度やホバリング時間を調整 |
| 点群密度不足 | 低速飛行や別角度からの補完取得 |
橋梁下部では、「ルートを飛んだか」ではなく、「点検対象部材が十分な角度と解像度で取得されたか」が重要です。
港湾・法面・プラントでは環境変化に対応する
Adaptive Flight Planningは、港湾、法面、プラントのように環境条件が変わりやすい対象でも重要です。
港湾では、潮位、船舶、クレーン、係留物、反射、風が影響します。法面では、地形の起伏、植生、落石、湧水、崩落跡、GNSS環境が影響します。プラントでは、配管、架台、タンク、煙突、ケーブルラックが複雑に入り組み、死角が多くなります。
| 対象 | 飛行計画で考慮すべき変化 | Adaptive Flight Planningの役割 |
| 港湾 | 潮位、船舶、クレーン、風、反射 | 撮影高さ・角度・安全距離を調整 |
| 法面 | 地形、植生、崩落、湧水、落石 | LiDAR点群で未取得面や変形箇所を補完 |
| プラント | 配管、架台、タンク、熱源、狭所 | 設備裏側や熱異常箇所を追加撮影 |
| 送電設備 | 電線、鉄塔、風、地形、電磁環境 | 安全距離を保ちながら必要角度を確保 |
| トンネル坑口 | GPS不安定、影、壁面反射 | SLAM・画像品質評価で撮影漏れを補正 |
| ダム・水路 | 水面反射、風、広範囲、斜面 | 重要箇所を優先してバッテリーを配分 |
このような対象では、事前ルートを完全に固定するより、点検中に対象物の状態や取得品質を見ながら、飛行計画を調整する方が実務に合っています。
マルチモーダルデータ融合と相性がよい
Adaptive Flight Planningは、RGB画像だけでなく、LiDARや熱画像と組み合わせることで効果が高まります。なぜなら、センサーごとに「良い取得条件」が違うからです。
RGB画像では、被写体の解像度、角度、照明、ブレが重要です。LiDARでは、点群密度、入射角、距離、遮蔽が重要です。熱画像では、撮影時刻、日射、距離、角度、反射、温度差が重要です。事前ルートだけでは、すべてのセンサーに最適な条件を満たすのは難しくなります。
| センサー | 取得品質を左右する条件 | 飛行計画の調整例 |
| RGB画像 | 解像度、角度、照明、ブレ | 接近、ホバリング、角度変更 |
| LiDAR | 点群密度、距離、入射角、遮蔽 | 低速飛行、別角度取得、距離調整 |
| 熱画像 | 撮影時刻、日射、反射、距離 | 時間帯変更、角度変更、RGB補完 |
| GNSS/RTK | 電波環境、遮蔽、基準局 | SLAM補完、飛行範囲制限 |
| IMU/SLAM | 形状特徴、照明、移動速度 | 速度調整、特徴点が多いルート選択 |
DJI FlightHub 2の公式ページでは、同プラットフォームが遠隔制御、インテリジェントな飛行スケジューリング、多様な飛行ルート管理、サードパーティ連携を提供すると説明されています。また、Waypoint Route Editorでは、3Dモデルを取り込み、ウェイポイント位置や撮影角度を調整し、安全なルートか確認できる機能が説明されています。
マルチモーダル点検では、飛行計画は単なる経路ではなく、センサーごとの取得条件を満たすためのデータ取得戦略になります。
バッテリー効率は“短く飛ぶ”ではなく“重要箇所に使う”
ドローン点検では、バッテリーが制約になります。飛行時間が限られる中で、すべての箇所を同じ密度で撮影すると、重要箇所の取得前にバッテリーが不足する可能性があります。
Adaptive Flight Planningでは、点検対象の重要度に応じてバッテリーを配分します。過去に変状があった箇所、AIが異常候補を検出した箇所、構造上重要な箇所、第三者被害リスクが高い箇所を優先し、重要度が低い範囲は粗く取得するという考え方です。
| バッテリー配分の考え方 | 実務での使い方 |
| 重要部材を優先 | 支承、桁端部、法面変状部、電気設備接続部を重点撮影 |
| 異常候補を優先 | AIが検出したひび割れ・熱異常・変形を追加撮影 |
| 取得済み箇所を避ける | 十分な画像・点群がある範囲は飛行を短縮 |
| バッテリー残量で判断 | 帰還余裕を確保しながら追加撮影を選ぶ |
| 複数機で分担 | 大型対象はドローンごとにエリア分割 |
バッテリー効率のKPIは、単に飛行時間を短くすることではありません。限られた飛行時間を、診断価値の高い場所に使えたかを評価する必要があります。
KPIは“飛行完了”ではなく“取得漏れを減らせたか”
Adaptive Flight Planningの効果は、予定ルートを飛び終えたかどうかでは評価できません。重要なのは、取得漏れ、再飛行、死角、危険接近、バッテリー効率をどれだけ改善できたかです。
| KPI | 意味 | 改善アクション |
| 取得漏れ箇所 | 必要な画像・点群・熱画像が取得できなかった箇所 | 飛行中のカバレッジ評価と追加撮影 |
| 再飛行回数 | 撮影不足や品質不良で再度飛行した回数 | 画像品質評価、点群密度評価を現場で実施 |
| 死角削減率 | 未撮影面・見えない角度を減らせた割合 | 3Dモデルと取得済み視点を比較 |
| バッテリー効率 | 診断価値の高いデータを取得できた割合 | 重要箇所を優先するルート最適化 |
| 点検時間 | 飛行、データ確認、再撮影を含む総時間 | 適応的な追加撮影で再飛行を削減 |
| 危険接近回避 | 障害物・構造物・電線への接近を回避した件数 | 安全距離、障害物検知、代替ルート生成 |
| 欠陥候補の追加取得率 | AIが検出した異常候補を追加撮影できた割合 | AI検出と飛行計画を連携 |
特に重要なのは、取得漏れ箇所と再飛行回数です。点検で最も無駄が大きいのは、現場から戻ってから「この角度が足りない」「ここがブレている」「熱画像が撮れていない」と気づくことです。Adaptive Flight Planningは、この再飛行を減らすための技術です。
現場実装で必要なデータフロー
Adaptive Flight Planningを実装するには、飛行計画、取得データ、AI解析、意思決定、再計画をつなぐデータフローが必要です。
| フェーズ | 実施内容 | 目的 |
| 事前準備 | BIM/CIM、点群、図面、過去点検結果を整理 | 重点撮影箇所と制約を決める |
| 初期ルート生成 | 対象形状と安全距離から基本ルートを作成 | 最初の取得計画を作る |
| 飛行中取得 | RGB、LiDAR、熱画像、位置情報を取得 | 点検データを収集 |
| 品質評価 | ブレ、露出、点群密度、死角、温度条件を確認 | 取得漏れを見つける |
| AI欠陥検出 | 異常候補、熱異常、形状変化を検出 | 追加撮影対象を決める |
| ルート更新 | バッテリー、安全距離、優先度を考慮して再計画 | 重要箇所を補完 |
| 報告連携 | 異常箇所、画像、点群、飛行ログを整理 | 点検報告・補修判断へつなげる |
この流れで重要なのは、飛行後の後処理だけでなく、飛行中または現場滞在中に取得品質を確認することです。現場で不足を見つけられれば、その場で追加撮影できます。
導入時に失敗しやすいポイント
Adaptive Flight Planningは有望ですが、導入すればすぐに完全自律点検ができるわけではありません。点検対象、飛行制約、センサー、AI、法規制、操縦者の判断を組み合わせる必要があります。
失敗しやすいポイントは次の通りです。
- 何を取得すべきか定義せずに自律飛行だけ導入する
- AI欠陥検出と飛行計画が分断されている
- 取得品質を現場で確認できず、後から再飛行になる
- 死角評価に使う3Dモデルや点群がない
- バッテリー残量を考慮せず追加撮影を増やしすぎる
- 安全距離や障害物回避のルールが曖昧
- RGB、LiDAR、熱画像の取得条件が統合されていない
- 取得したデータが点検報告や維持管理台帳に連携されない
特に重要なのは、点検対象ごとに「最低取得要件」を決めることです。橋梁支承なら何方向から撮るのか、法面ならどの点群密度が必要か、熱画像ならどの時間帯・距離・角度が必要かを決めておかなければ、AIは何を不足と判断すべきか分かりません。
対象別の導入シナリオ
Adaptive Flight Planningは、対象物によって使い方が変わります。橋梁下部、港湾、法面、プラント、送電設備では、飛行制約も異なります。
| 対象 | 導入シナリオ |
| 橋梁下部 | 3Dモデルで未撮影面を検出し、桁下・支承・橋脚周りを追加撮影 |
| 港湾 | 潮位や係留物を考慮し、岸壁・桟橋・クレーン周辺を安全距離で撮影 |
| 法面 | LiDARで地形変化を確認し、崩落候補や湧水箇所を追加取得 |
| プラント | 配管・架台・タンクの死角を検出し、熱異常や腐食候補を再撮影 |
| 送電設備 | 電線・鉄塔との安全距離を保ちながら、碍子・接続部を重点撮影 |
| 太陽光パネル | 熱異常を検出したパネルをRGBで追加撮影し、保守対象を特定 |
最初に導入しやすいのは、橋梁やプラントのように死角が多い対象、または太陽光パネルのように熱異常の追加確認が明確な対象です。
建設会社・点検会社・ドローン事業者にとってのチャンス
Adaptive Flight Planningは、建設会社、点検会社、測量会社、ドローン事業者、建設コンサルタント、インフラ管理者にとって新しい提案領域になります。
これまでのドローン点検は、撮影代行、写真整理、簡易報告が中心でした。今後は、点検対象に応じて飛行計画を動的に更新し、取得漏れを減らし、AIが欠陥候補を検出し、その場で追加撮影するサービスが求められます。
提供できるサービスとしては、次のようなものがあります。
- 橋梁下部向けAdaptive Flight Planning点検
- プラント・港湾向け死角削減ドローン点検
- 法面LiDAR点群とAI再計画の統合点検
- 太陽光パネルの熱異常検出と追加RGB撮影
- 取得漏れ・再飛行削減レポート
- BIM/CIM・点群を使った飛行計画自動生成
- AI欠陥検出と追加撮影の現場ワークフロー設計
- 点検データと維持管理台帳の連携
- ドローン点検KPIダッシュボード構築
点検会社にとって、Adaptive Flight Planningは「より高度な飛行技術」だけではありません。再飛行を減らし、点検品質を高め、報告書の根拠を強くするサービスとして提案できます。
まとめ:ドローン点検は“飛んで撮る”から“状況を見て飛び方を変える”へ
複雑なインフラ点検では、事前に決めたルートを飛ぶだけでは、死角や取得漏れが発生します。橋梁下部、港湾、法面、プラント、送電設備のような対象では、構造物の形状、障害物、風、バッテリー、センサー品質、欠陥候補を見ながら、飛行計画を更新する必要があります。
Adaptive Flight Planningは、ドローン点検を“事前ルート飛行”から“AIが飛行計画を更新する点検”へ変える考え方です。RGB画像、LiDAR、熱画像を組み合わせ、AI欠陥検出と取得品質評価を飛行計画へ反映することで、取得漏れ、再飛行、死角、危険接近を減らせます。
これからのKPIは、飛行回数や撮影枚数ではありません。取得漏れ箇所、再飛行回数、死角削減率、バッテリー効率、点検時間、危険接近回避です。
ドローンは“決めたルートを飛ぶ”から“状況に応じて飛び方を変える”へ。Adaptive Flight Planningは、マルチモーダルUAV点検を実務で使えるレベルへ引き上げる重要な施工・維持管理DXテーマになっていくはずです。





