
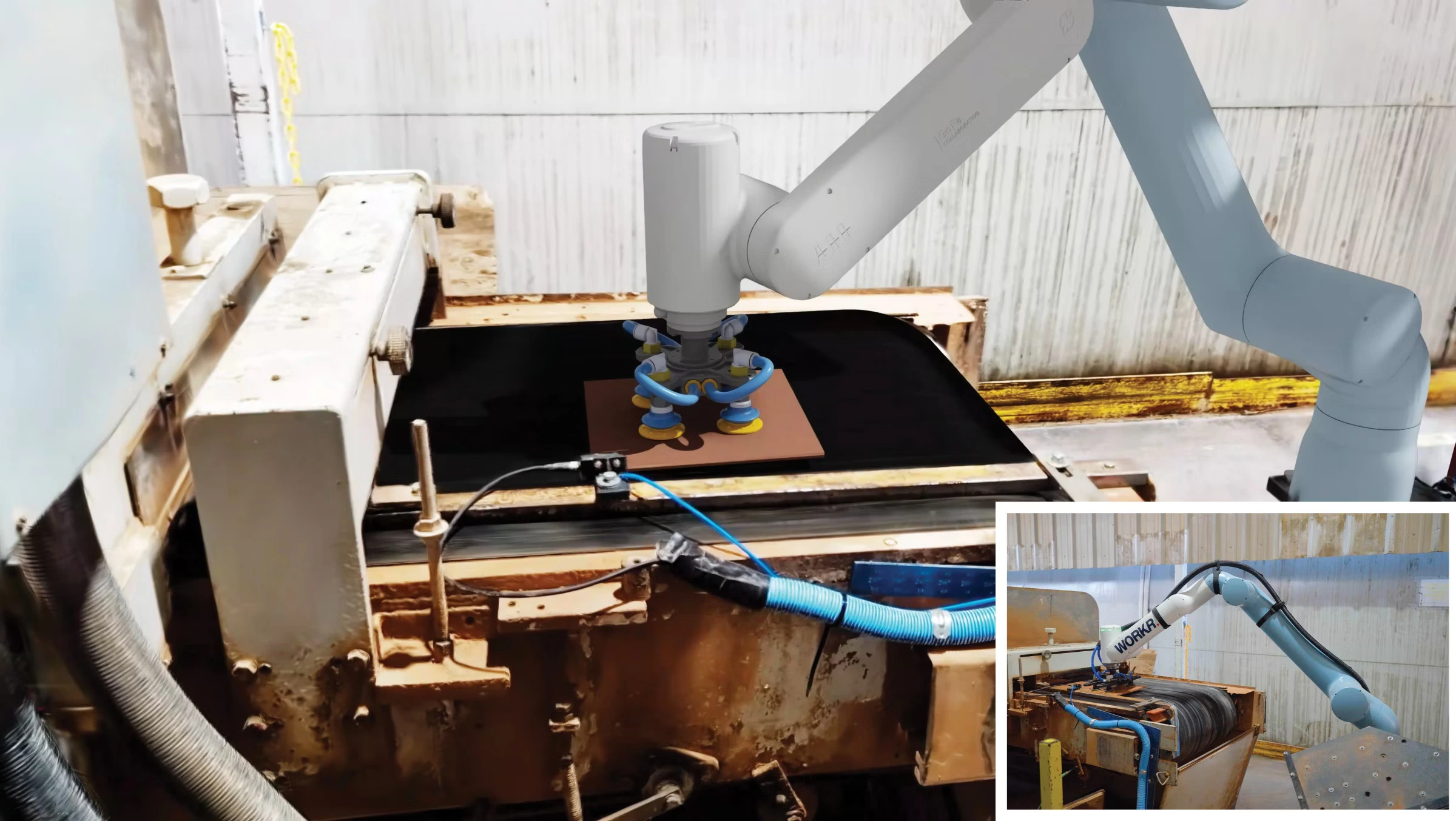
建設ロボットは“動けばよい”では足りない:エンボディドAI時代の安全設計と運用ガバナンス
建設ロボット、遠隔施工機械、ドローン、搬送ロボットなど、現実世界で動くAIは「エンボディドAI」として安全性、信頼性、説明責任、運用ガバナンスが問われます。ヒヤリハット、緊急停止、遠隔介入、ログ保存、原因追跡、作業員の受容度をKPIにした安全設計を解説します。
建設ロボットは“動けばよい”では足りない:エンボディドAI時代の安全設計と運用ガバナンス 続きを読む »
建設ロボット、遠隔施工機械、ドローン、搬送ロボットなど、現実世界で動くAIは「エンボディドAI」として安全性、信頼性、説明責任、運用ガバナンスが問われます。ヒヤリハット、緊急停止、遠隔介入、ログ保存、原因追跡、作業員の受容度をKPIにした安全設計を解説します。
建設ロボットは“動けばよい”では足りない:エンボディドAI時代の安全設計と運用ガバナンス 続きを読む »

建設ロボットRaaSは、墨出しロボット、現場巡回ロボット、測量ロボット、資材搬送ロボット、清掃ロボットを購入するのではなく、必要な期間・用途に応じて利用するモデルです。初期投資、保守、教育、現場調整の負担を抑えながら、自動化を試すためのKPIと導入ポイントを解説します。
建設ロボットは“買う”から“使う”へ:RaaSが下げる自動化導入のハードル 続きを読む »
ロボットの仮想訓練は、重機、自律搬送ロボット、墨出しロボット、点検ロボットなどを現場投入前にシミュレーAIション環境で学習・検証する建設DXです。点群、BIM/CIM、施工計画、危険区域を使い、現場実証回数、導入前調整時間、例外ケース検証数、事故リスク、ロボット停止率を改善する方法を解説します。
建設ロボットは“現場で試す”前に“仮想空間で鍛える”へ:シミュレーションAIが変える導入プロセス 続きを読む »
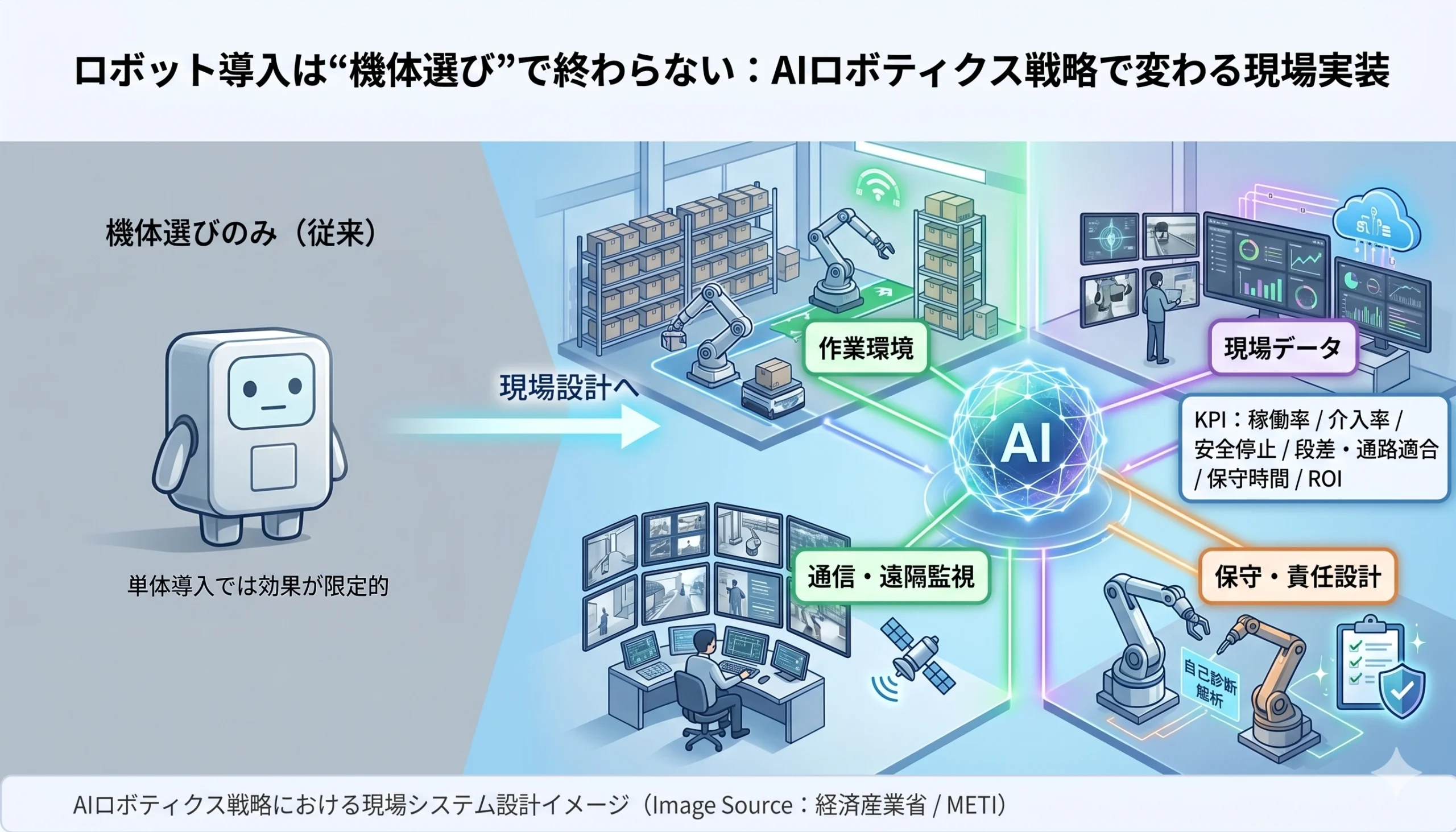
経済産業省はAIロボティクス戦略検討会議を開催し、AIロボティクス戦略、分野別AIロボティクス実装ロードマップ、概要資料を公開しています。ロボット導入は、機体を選ぶだけではなく、AI、現場データ、作業環境、通信、遠隔監視、保守、責任分界点を含む“現場システム設計”へ移行しています。
ロボット導入は“機体選び”で終わらない:AIロボティクス戦略で変わる現場実装 続きを読む »

日本の慢性的な人手不足を背景に、フィジカルAI(AI×ロボット)は「置換」ではなく“現場の継続運転(continuity tool)”として導入され始めている。評価軸は賢さではなく稼働率・介入率・保守性・安全。現場で止まらない設計のKPIと、導入時に効く運用チェックリストを具体的に解説。
フィジカルAIが“実験”から“現場の継続運転ツール”へ:稼働率・介入率で測る導入KPI 続きを読む »