
地下埋設物は“掘って確認”から“AIで事前推定”へ:GPR・点群・台帳データが変える施工リスク管理
都市部工事では、水道管、ガス管、通信ケーブル、電力管路、古い埋設物が複雑に入り組み、掘削前のリスク把握が重要です。GPR、既存台帳、地上点群、SLAM、UAV測量、AI解析を組み合わせ、地下埋設物を非破壊で推定する施工前リスク管理を解説します。
地下埋設物は“掘って確認”から“AIで事前推定”へ:GPR・点群・台帳データが変える施工リスク管理 続きを読む »
都市部工事では、水道管、ガス管、通信ケーブル、電力管路、古い埋設物が複雑に入り組み、掘削前のリスク把握が重要です。GPR、既存台帳、地上点群、SLAM、UAV測量、AI解析を組み合わせ、地下埋設物を非破壊で推定する施工前リスク管理を解説します。
地下埋設物は“掘って確認”から“AIで事前推定”へ:GPR・点群・台帳データが変える施工リスク管理 続きを読む »

建設ロボット、AIカメラ、IoTセンサー、ドローン、重機が増えるほど、次の課題は「個別機器をどう連携させるか」になります。Connected Roboticsにより、搬送ロボット、巡回ロボット、ドローン、AIカメラ、重機、IoTセンサーを一体で運用する施工DXの実務論点を解説します。
建設ロボットは“単体導入”から“つながる現場”へ:Connected Roboticsが変える施工DX 続きを読む »

建設現場のAI活用は、大規模クラウドAIだけでなく、現場端末やエッジ機器で動くSmall Language Modelへ広がっています。日報の音声入力、現場ルール検索、安全手順確認、機械トラブル対応、オフライン時のAI支援を、低遅延・省通信・オンサイトAIの視点で解説します。
建設AIは“大型クラウドAI”だけでは動かない:現場で使うSmall Language Modelの可能性 続きを読む »

再エネインフラの拡大により、太陽光発電所の造成、杭打ち、架台設置、パネル施工では、反復作業の自動化が重要になっています。自動杭打ちロボット、パネル施工ロボット、現場デジタルツインを活用した再エネ建設DXの実務論点を解説します
太陽光発電所の施工は“人海戦術”から“ロボット化”へ:再エネ建設DXの次の現場 続きを読む »
デジタルツインは、現実を3Dで再現するだけのモデルから、AIと物理モデルを組み合わせて未来を予測し、工程・災害・ロボット・保全に介入するワールドモデルへ進化しています。建設現場、施設、都市、ロボット運用におけるAIデジタルツインの実務論点を解説します。
建設AIは“個別開発”から“自動接続パイプライン”へ:ZeroConf AIが変える現場データ連携 続きを読む »

内装仕上げ、特にドライウォール仕上げは、上向き作業、粉じん、反復作業、品質ばらつきが課題です。Canvasのような協働ロボット型ドライウォール仕上げロボットが、仕上げ時間、補修回数、粉じん曝露、検査合格率をどう変えるのかを解説します。
内装仕上げは“職人だけに頼る”から“ロボットが補助する”へ:ドライウォールロボットが変える品質管理 続きを読む »
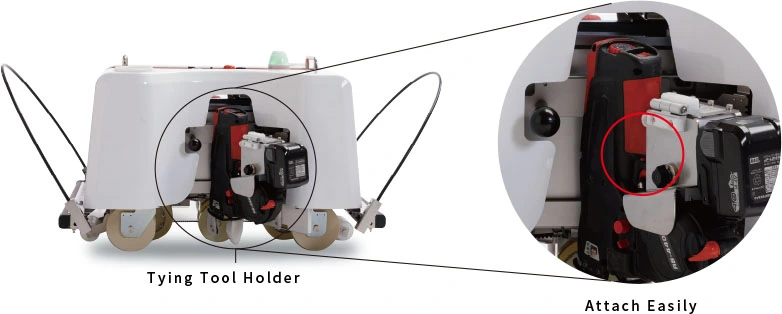
鉄筋結束は、腰をかがめる姿勢と手首・腕の反復作業が多く、作業員負担と人手不足の両面で課題があります。SLAM、LiDAR、センサーフュージョンを活用した自律型鉄筋結束ロボットが、床スラブや橋梁床版の施工をどう変えるのかを解説します。
鉄筋結束は“腰をかがめる反復作業”から“ロボット施工”へ:SLAM搭載ロボットが変える躯体工事 続きを読む »

高層建築や大規模現場では、タワークレーンの配置、揚重順序、風速、複数業者の利用調整が工程全体を左右します。AIリフト計画により、揚重待ち時間、クレーン稼働率、風による停止時間、資材搬入遅延、クレーン干渉をどう最適化できるのかを解説します。
タワークレーン管理は“順番待ち”から“AI最適化”へ:揚重計画DXが変える施工工程 続きを読む »

建設現場のリアリティキャプチャは、人がカメラやLiDARを持って歩く記録業務から、ロボットが定期巡回し、進捗・品質・安全を自動記録する段階へ進みつつあります。自律スキャンロボットが施工管理DXにもたらす価値とKPIを解説します。
現場記録は“人が撮りに行く”から“ロボットが巡回する”へ:自律スキャンロボットの施工管理DX 続きを読む »

4D BIMは工程、5D BIMはコストを3Dモデルに接続する考え方です。AIを組み合わせることで、天候、資材、コスト、工程、施工順序をもとに、遅延予測、再計画、シナリオ分析を行う施工マネジメントへ進化しています。
工程表は“作って終わり”から“AIで再計画”へ:4D/5D BIMが変える施工マネジメント 続きを読む »