鉄筋工事は、建物やインフラの強度を支える重要な工程です。柱、梁、壁、床スラブ、基礎、橋梁床版など、コンクリート構造物の内部には大量の鉄筋が配置され、それぞれの交点を結束していきます。特に床スラブや橋梁床版では、作業員が広い範囲を移動しながら、腰をかがめ、同じ姿勢で何百回、何千回と結束作業を繰り返します。
この反復作業は、施工品質を支える一方で、作業員の身体負担と人手不足の両面で大きな課題になっています。NIOSHは、鉄筋工が鉄筋を結束する際、腰部や手・手首の障害につながるリスク要因にさらされることを評価しており、電動結束工具や延長ハンドル付き工具が作業負担を減らす可能性を示しています。
そこで注目されているのが、ロボット鉄筋結束です。従来は、人が鉄筋上を歩いて結束していた作業を、ロボットが自律移動しながら交点を認識し、結束していく方向へ進みつつあります。近年は、センサーフュージョン、SLAM、LiDARを活用し、鉄筋上を走行しながら結束点を把握する自律型ロボットの事例も登場しています。2026年の建設ロボティクス動向では、Spacer RoboticsのGRIDが、センサーフュージョン、SLAM、LiDARを組み合わせた自律型鉄筋結束ロボットの例として紹介されています。
なぜ鉄筋結束はロボット化しやすいのか
建設現場のロボット化は、すべての作業に向いているわけではありません。現場は変化が多く、地面も不整で、資材や作業員が移動し、同じ条件が続きにくいからです。しかし、鉄筋結束の一部、特に床スラブや橋梁床版のような水平鉄筋の結束は、ロボット化と相性がよい領域です。
理由は、作業内容が比較的明確だからです。鉄筋の交点を見つけ、指定されたパターンで結束し、次の交点へ移動する。この繰り返し作業は、人にとっては負担が大きい一方、ロボットにとってはタスクを定義しやすい作業です。
もちろん、鉄筋工事全体がロボットだけで完結するわけではありません。鉄筋の搬入、配筋、端部処理、柱・壁・梁の立体的な鉄筋、スペーサー配置、開口補強、検査対応などは、今後も人の判断と技能が重要です。ロボット鉄筋結束の現実的な役割は、人が配筋・調整した水平鉄筋の交点を、効率よく、均一に、長時間結束することです。
| 鉄筋工事の作業 | ロボット化しやすさ | 理由 |
|---|---|---|
| 床スラブの鉄筋結束 | 高い | 平面上で交点が規則的に並び、反復作業が多い |
| 橋梁床版の鉄筋結束 | 高い | 広い水平面で結束点が多く、作業負担が大きい |
| 基礎マットの結束 | 中〜高 | 面積が広いが、段差やスターラップに注意が必要 |
| 柱・梁・壁の立体配筋 | 低〜中 | 立体的で姿勢・工具角度・干渉が複雑 |
| 端部・開口補強 | 低 | 現場判断と細かい調整が必要 |
| 配筋検査・出来形確認 | 中〜高 | 点群・画像AIとの連携で支援可能 |
つまり、ロボット鉄筋結束は「鉄筋工を置き換える技術」ではなく、「鉄筋工が最も疲れる反復作業を分担する技術」として考えるべきです。
すでに商用化されている鉄筋結束ロボット
鉄筋結束ロボットは、研究段階だけの話ではありません。すでに複数の製品・サービスが現場導入されています。
Advanced Construction RoboticsのTyBOTは、橋梁床版などの水平鉄筋結束を対象にした自律型ロボットです。公式ページでは、事前マッピング不要で作業エリアを自律走行し、2時間以内に稼働開始でき、1時間あたり1,200以上の結束が可能と説明されています。 また、TyBOTは最大10時間連続で稼働し、上筋・下筋、黒皮・エポキシ塗装鉄筋に対応し、橋梁床版向けに幅10〜117フィートまで拡張できるとされています。
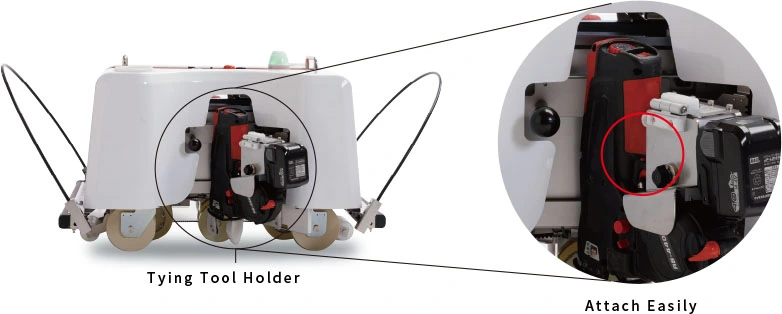
日本では、建ロボテックのREBAR TYING ROBOT TOMOROBO©が、鉄筋結束作業を自動化する協働ロボットとして紹介されています。TOMOROBO©は、市販のハンドヘルド鉄筋結束機を取り付けることで、現場作業員の代わりに鉄筋交点を結束し、作業員がより高度な作業に集中できるようにすることを狙っています。 同社は、2台の結束機を使い、200mmピッチの場合は1か所あたり2.7秒以下で結束でき、鉄筋ピッチの変化にも自動対応すると説明しています。
| 製品・事例 | 特徴 | 主な対象 |
|---|---|---|
| TyBOT | 自律走行、事前マッピング不要、1,200+ ties/hour | 橋梁床版、広い水平鉄筋 |
| TOMOROBO© | 市販結束機を装着、協働ロボット、ピッチ変化に対応 | 建築床スラブ、土間、水平鉄筋 |
| GRID | SLAM・LiDARで鉄筋上を走行する構想 | 水平グリッド鉄筋、プロトタイプ段階 |
| OpenTie研究 | RGB-to-point-cloudとオープン語彙検出を使う研究 | 3D鉄筋環境での結束支援 |
このように、商用ロボット、プロトタイプ、研究開発が同時に進んでおり、鉄筋結束は建設ロボティクスの中でも実装が進みやすい領域になっています。
SLAM・LiDARがなぜ重要なのか
鉄筋結束ロボットで重要なのは、単に結束機を動かすことではありません。ロボットが「今どこにいて、どの交点を結束すべきか」を認識できることです。そこで重要になるのが、SLAM、LiDAR、カメラ、IMUなどを組み合わせたセンサーフュージョンです。
SLAMは、ロボットが周囲を認識しながら自己位置を推定し、同時に地図を作る技術です。建設現場では、環境が日々変わり、資材や作業員が動き、床面も完全に整っていないため、正確な自己位置推定は難しくなります。Springerの研究では、建設ロボットにとってSLAMは複雑な現場環境での地図作成と自己位置推定を可能にする重要技術である一方、大型公共建築のような現場では空間構造が複雑で、動的な不確実性も大きく、精度確保が難しいと整理されています。
GRIDについては、鉄筋グリッド上を直接走行し、オンボードのSLAMとLiDARナビゲーションで結束点を見つける仕組みが紹介されています。ただし、同ページではプロトタイプ段階であり、公開情報上の確定した導入実績や顧客は確認されていないとも明記されています。
| 技術 | 役割 | 鉄筋結束での意味 |
|---|---|---|
| LiDAR | 距離・形状の取得 | 鉄筋グリッド、障害物、走行空間を認識 |
| カメラ | 画像認識 | 鉄筋交点、結束済み箇所、障害物を確認 |
| IMU | 姿勢・加速度の把握 | 鉄筋上の揺れや傾きを補正 |
| SLAM | 自己位置推定・地図作成 | どこを結束済みか、次にどこへ行くかを管理 |
| センサーフュージョン | 複数センサーの統合 | 鉄筋の反射、影、段差に強い認識を実現 |
| 施工ログ | 作業履歴の記録 | 結束箇所、時刻、エラー、再確認を残す |
今後の鉄筋結束ロボットは、単なる自動工具ではなく、現場を認識しながら施工し、その結果をデータとして残す「施工ロボット」へ進化していくと考えられます。
KPIは“何時間働いたか”ではなく“何を正しく結束したか”
ロボット鉄筋結束を導入する場合、稼働時間だけを見ても効果は判断できません。重要なのは、結束数、結束漏れ、施工時間、再確認時間、作業員負担、ロボット稼働率を組み合わせて見ることです。
| KPI | 意味 | 改善アクション |
|---|---|---|
| 結束数 | ロボットが結束した交点数 | 対象範囲、ロボット台数、稼働時間を最適化 |
| 作業員負担 | 腰曲げ姿勢、手首反復、歩行距離の削減 | 人が担当する作業とロボット作業を分担 |
| 施工時間 | 人手結束と比較した作業時間 | 配筋完了後すぐロボットを投入する段取りへ変更 |
| 結束漏れ | 未結束・不完全結束の数 | 施工ログ、画像確認、再巡回で補正 |
| 再確認時間 | 結束後の確認にかかる時間 | 結束済みマップと写真記録を活用 |
| ロボット稼働率 | 待機時間を除いた実作業比率 | 充電、ワイヤー補給、作業エリア開放を改善 |
| 手戻り件数 | 結束不備や検査指摘によるやり直し | 結束パターンと施工ログを標準化 |
TyBOTは、実績データを使った事例として、I-30 Crossingプロジェクトで3台のTyBOTが同時稼働し、669,142回の実結束、553時間の実稼働、30%の工程短縮を達成したと紹介されています。 こうしたデータは、ロボットを「便利そうな機械」としてではなく、工程・原価・安全のKPIで評価するために重要です。
作業員負担軽減は導入理由として強い
鉄筋結束ロボットの価値は、省人化だけではありません。作業員の身体負担を減らすことも大きな導入理由です。
鉄筋結束は、地面近くで作業するため、前かがみ姿勢が長く続きます。手作業の場合、手首や前腕を反復的に動かし、強い把持力を使うこともあります。Waterloo大学のCRE-MSDは、鉄筋結束ではワイヤーを結ぶために速く反復的な手・腕のひねり動作と強い把持力が必要で、地面レベルでの作業は腰部リスクも高めると説明しています。
ロボットが水平鉄筋の大量結束を担当すれば、作業員は次のような作業に集中できます。
- 配筋の位置調整
- 端部・開口部・柱周りなど複雑箇所の結束
- スペーサー・サイコロの配置確認
- 配筋検査前の確認
- ロボットのルート確保・ワイヤー補給
- 施工ログと出来形確認
- 次工程との段取り調整
つまり、ロボットは人を不要にするのではなく、人の作業を「単純反復」から「判断と品質管理」へ移す役割を持ちます。
床スラブ・橋梁床版で効果が出やすい
ロボット鉄筋結束が特に効果を出しやすいのは、結束点が多く、水平面が広く、反復作業が続く工種です。
代表例が橋梁床版です。TyBOTは、橋梁床版向けに既存の端部型枠やスクリードレール上で稼働でき、広い作業幅に対応する設計になっています。 橋梁床版では、同じピッチで大量の交点が並び、作業が長時間に及ぶため、ロボットによる反復結束の価値が出やすくなります。
建築分野では、床スラブ、土間、基礎マットなどが対象になります。TOMOROBO©は、土間やスラブ上の鉄筋交点を正確に結束し、ピッチ変化にも対応できるとされています。
| 対象工種 | ロボット適用のしやすさ | 導入効果 |
|---|---|---|
| 橋梁床版 | 高い | 大量結束、工程短縮、作業負担軽減 |
| 建築床スラブ | 高い | 広い水平面で反復作業を削減 |
| 土間コンクリート | 高い | 単純反復作業を自動化しやすい |
| 基礎マット | 中〜高 | 面積が広く効果が出るが段差に注意 |
| 柱・壁配筋 | 低〜中 | 立体形状が複雑で人の作業が中心 |
| 梁・開口補強 | 低 | 端部処理や複雑結束が多い |
導入初期は、最もロボットが得意な水平グリッドから始め、実績と施工ログを蓄積しながら対象範囲を広げるのが現実的です。
施工ログ連携で“結束した証拠”を残す
ロボット鉄筋結束が本当に施工管理DXにつながるのは、結束作業のログが残るからです。人手作業では、どの交点をいつ誰が結束したかをすべて記録することは現実的ではありません。しかし、ロボットであれば、結束した位置、時刻、パターン、エラー、再実行、ワイヤー切れ、停止時間などをデータとして残せます。
この施工ログを、BIM/CIM、施工管理アプリ、写真、点群、配筋検査記録とつなげることで、鉄筋工事の品質管理が変わります。
| 施工ログ | 活用方法 |
|---|---|
| 結束位置 | どの範囲を結束済みかマップ化 |
| 結束時刻 | 作業進捗と日報に自動反映 |
| 結束パターン | 100%、50%、33%など指定パターンの確認 |
| エラー箇所 | 再確認・手直し箇所として表示 |
| 停止理由 | ワイヤー補給、障害物、段差、バッテリー切れを分析 |
| 作業時間 | 人手作業との比較、工程計画に反映 |
| 再確認結果 | 検査前の是正履歴として保存 |
TyBOTは、自動化された100%、50%、33%の結束パターンで均一な結束配置を実現し、リアルタイムの生産性・使用状況メトリクスを計画、見積、原価管理に活用できると説明されています。
このように、ロボット鉄筋結束は、作業を自動化するだけでなく、施工品質と工程管理のデータ化にもつながります。
AI・点群・配筋検査との連携
ロボット鉄筋結束の次の展開は、AI画像認識や点群データとの連携です。結束ロボットが現場を走行するなら、その走行中に配筋状態や結束状態を記録し、後から検査や出来形確認に使うことができます。
研究面では、OpenTieのように、RGB画像から点群を生成し、オープン語彙検出を使って3D環境で鉄筋結束を扱う試みも出ています。従来の製品や研究は平面的な鉄筋環境に焦点を当てるものが多い一方、より複雑な3D鉄筋環境へ対応する研究が進んでいます。
将来的には、次のような連携が考えられます。
- ロボットが結束しながら鉄筋交点を自動認識する
- 配筋図やBIMと実際の鉄筋位置を比較する
- 結束済み・未結束・要確認箇所をマップ化する
- 点群や画像で配筋ピッチ、かぶり、スペーサー位置を確認する
- 配筋検査前にAIがリスク箇所を抽出する
- 施工ログを竣工データや品質記録として保存する
この方向へ進むと、鉄筋結束ロボットは単なる作業機械ではなく、躯体工事の出来形・品質データを集めるモバイルセンサーにもなります。
導入時に注意すべきポイント
ロボット鉄筋結束は有効ですが、現場に置くだけで自動的に成果が出るわけではありません。導入時には、ロボットが動きやすい配筋計画、作業エリア、段取り、補助作業が必要です。
注意すべきポイントは次の通りです。
- ロボットが走行できる水平鉄筋エリアを確保する
- 端部、開口部、柱周り、段差部は人の作業として切り分ける
- ワイヤー補給、バッテリー、充電、工具メンテナンスの担当を決める
- 結束パターンと検査基準を事前に確認する
- 結束漏れやエラー箇所の再確認フローを作る
- ロボット走行中に他作業と干渉しないよう工程を調整する
- 鉄筋のピッチ、段差、浮き、ズレがロボット認識に影響することを考慮する
- 雨天、泥、鉄筋の濡れ、照明条件などの現場条件を確認する
特に重要なのは、ロボット作業を「鉄筋工事の最後に追加する作業」と考えないことです。ロボットを使うなら、配筋、結束、検査、打設までの段取り全体を見直す必要があります。
現場実装のおすすめステップ
ロボット鉄筋結束は、いきなり全現場に広げるより、条件の合う工種から始めるのが現実的です。
| フェーズ | 実施内容 | 目的 |
|---|---|---|
| 初期導入 | 床スラブ・橋梁床版など水平鉄筋で試行 | ロボット適用範囲と効果を確認 |
| 作業分担 | ロボット作業と人手作業を分ける | 端部・複雑箇所の品質を確保 |
| KPI計測 | 結束数、施工時間、結束漏れ、再確認時間を記録 | 効果を定量評価 |
| 施工ログ連携 | 結束済みマップ、日報、検査記録へ連携 | 品質管理と工程管理に使う |
| 複数台運用 | 広い床版・スラブで台数を増やす | 工程短縮と稼働率向上 |
| 全社展開 | 標準工法、教育、見積単価へ反映 | ロボット施工を通常業務化 |
最初におすすめなのは、橋梁床版、物流施設や工場の床スラブ、大面積の土間コンクリートです。反復性が高く、結束点が多く、ロボットの稼働率を高めやすいからです。
建設会社・鉄筋工事会社・ロボット事業者にとってのチャンス
ロボット鉄筋結束は、ゼネコンだけでなく、鉄筋工事会社、ロボットベンダー、測量・点群事業者、施工管理ソフト会社にとっても新しい提案領域になります。
鉄筋工事会社にとっては、人手不足の中で施工能力を維持し、作業員の身体負担を減らし、若手が定着しやすい職場づくりにつながります。建設会社にとっては、工程遅延リスクを下げ、配筋検査前の確認時間を短縮し、施工ログを品質記録として残せます。ロボット事業者にとっては、単体ロボット販売だけでなく、施工データ、保守、現場導入支援まで含めたサービス化の余地があります。
提供できるサービスとしては、次のようなものがあります。
- 鉄筋結束ロボットの現場導入支援
- 床スラブ・橋梁床版向けのロボット施工計画
- 結束数・施工時間・結束漏れのKPIレポート
- 施工ログとBIM/CIM・日報の連携
- 配筋検査前の未結束箇所抽出
- ロボット稼働率改善コンサルティング
- 鉄筋工事会社向けのロボットオペレーター教育
今後は、鉄筋工の中にも、ロボットを管理し、施工ログを確認し、複数台を運用する「ロボット施工管理者」のような役割が増えていく可能性があります。
まとめ:鉄筋結束は“反復作業”から“データを残すロボット施工”へ
鉄筋結束は、建設現場に欠かせない作業でありながら、腰をかがめる姿勢と手首・腕の反復動作が多く、作業員負担が大きい工程です。人手不足が進む中で、この作業をすべて人の反復作業に頼り続けることは難しくなっています。
ロボット鉄筋結束は、床スラブや橋梁床版のような水平鉄筋で効果を出しやすく、TyBOTやTOMOROBO©のような実用機に加え、SLAM・LiDARを活用するGRIDのような新しい方向性も出ています。重要なのは、ロボットを導入すること自体ではなく、結束数、作業員負担、施工時間、結束漏れ、再確認時間、ロボット稼働率をKPIとして管理することです。
これからの鉄筋工事では、人が配筋と品質判断を担い、ロボットが大量の反復結束を担当し、その施工ログを出来形管理や検査記録に連携する流れが広がっていくはずです。鉄筋結束は“腰をかがめる反復作業”から、“SLAMロボット施工”と“データで確認できる躯体工事”へ進化しようとしています。



