ロボットは高度化ではなく“構造変化”している
ロボットはすでに数十年前から、自動車工場や半導体製造ラインで活躍してきました。
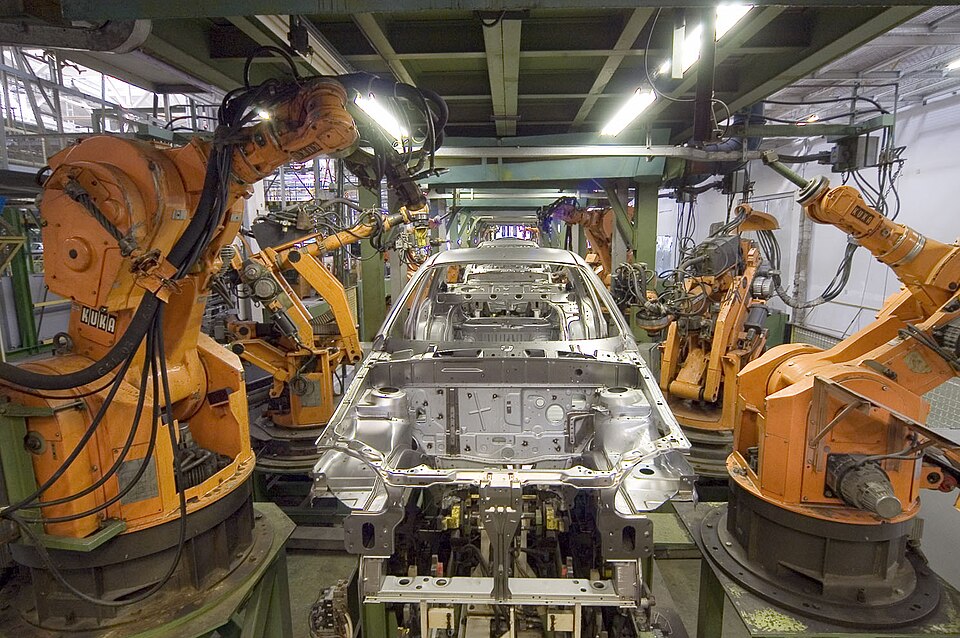
溶接、組立、搬送など、高精度かつ高速な作業を安定して行う産業ロボットは、日本の製造業を支える重要な存在です。
しかし近年登場した「フィジカルAI(Physical AI)」は、従来のロボットの単なる高性能版ではありません。
これはロボットの進化ではなく、“分岐”です。
構造思想そのものが根本的に異なっています。
フィジカルAIとは何か?
AIが物理世界で自律的に判断し、学習し、行動する統合型システム
を指します。
NVIDIAは公式ブログで「Physical AI」という概念を明確に提示し、ロボティクスをAI基盤へ進化させる戦略を発表しています。
このアプローチでは、以下が統合されています:
- コンピュータビジョン(視覚認識)
- 強化学習
- 大規模言語モデル(LLM)
- センサーフュージョン
- クラウド連携
つまり、ロボットは単なる機械ではなく、知能を持つソフトウェア駆動型システムへと変化しています。
従来型ロボティクスの特徴
従来型ロボットは、極めて完成度の高い技術です。
主な特徴
- 事前プログラム型
- 固定作業専用
- 高精度・高速動作
- 環境変化への適応は限定的
代表例
- FANUC産業ロボット
- KUKAアームロボット
- 自動車溶接ライン
これらは「決められた環境」で最大効率を発揮します。
強みは 再現性と信頼性 です。
フィジカルAIの特徴
一方で、Teslaが開発するヒューマノイド「Optimus」や、Figure AI(OpenAIと提携)による言語理解統合ロボットは、全く異なる設計思想を持っています。
フィジカルAIの特性
- 自律判断
- 環境適応能力
- 継続学習
- ソフトウェアアップデート可能
- 多用途対応
核心は「汎用性」です。
従来型ロボットが“専用機”であるのに対し、フィジカルAIは**“汎用労働プラットフォーム”**を目指しています。
技術構造の比較
| 項目 | 従来型ロボット | フィジカルAI |
|---|---|---|
| 制御方式 | 固定プログラム | AI自律制御 |
| 学習能力 | なし | 強化学習あり |
| 環境適応 | 低い | 高い |
| 再構成性 | 低い | 高い |
| データ活用 | 限定的 | クラウド連携 |
フィジカルAIは「ソフトウェア定義型ロボット」とも呼べます。
導入コストとROIの違い
従来型ロボット
- 初期投資は高額
- ROIは明確
- 特定工程に最適化
フィジカルAI
- 現時点では高コスト
- しかし用途横断的に展開可能
- ソフトウェア更新により価値が増幅
Amazonは物流倉庫で自律ロボット導入を加速させています。
ヒューマノイドが普及すれば、人間向け設備をそのまま活用できる可能性もあります。
これは設備投資構造そのものを変える可能性を秘めています。
産業へのインパクト
短期(〜5年)
従来型ロボットが主流。
中期(5〜10年)
人間とロボットの協働モデルが拡大。
長期(10年以上)
フィジカルAIが労働インフラ化。
Morgan Stanleyは、ヒューマノイド市場が将来的に数兆ドル規模へ拡大する可能性を示唆しています。
日本市場への示唆
日本は:
- 高齢化社会
- 深刻な人手不足
- 製造業依存
- 建設・物流の慢性的労働力不足
という構造的課題を抱えています。
従来型ロボットはすでに浸透していますが、フィジカルAIは「労働補完」領域で大きなポテンシャルを持ちます。
特に有望分野:
- 建設
- 物流
- 介護
- インフラ保守
- 災害対応
日本にとって、これは単なる技術革新ではなく、社会構造の持続性に関わるテーマです。
結論:置き換えではなく“再編”
フィジカルAIは、従来型ロボットを即座に置き換えるものではありません。
しかし長期的には、
ロボットは「機械」から「知能インフラ」へ
と再定義される可能性があります。
製造業では両者の併存が続きつつ、高度な判断が求められる領域ではフィジカルAIが主導する未来が見えてきます。
まとめ
- 従来型ロボット → 高精度特化型
- フィジカルAI → 自律適応型
- 未来の鍵は「統合戦略」
重要なのは「どちらが勝つか」ではなく、
両者をどう組み合わせ、産業構造に組み込むか
です。
今後10年は、ロボティクスの歴史における転換点になるでしょう。




