建設機械の自動化というと、まず思い浮かぶのは「無人で動くバックホウ」や「自動で走るダンプ」です。人が乗らなくても掘削する、運搬する、整地する。こうした単体機械の自動化は、建設現場の省人化にとって重要な一歩です。
しかし、実際の建設現場は、1台の重機だけで完結するわけではありません。バックホウが掘削し、クローラーダンプが土砂を運び、ブルドーザーが敷き均し、測量データで出来形を確認し、作業員や誘導員が現場内を移動します。地形、土量、重機位置、作業員の立入、施工計画、天候、仮設道路、搬出入の状況は常に変化します。
そのため、これからの自律施工は「重機1台を自動化する」だけでは不十分です。現場センサー、BIM/CIM、点群、施工計画、動作計画、重機制御、安全管理をつなぎ、現場全体をデータで制御する仕組みが必要になります。
この考え方が、自律施工CPSです。CPSとはCyber-Physical Systemの略で、現実空間の状態をセンサーで取得し、サイバー空間のモデルで分析・計画し、その結果を物理空間の機械制御に戻す仕組みです。
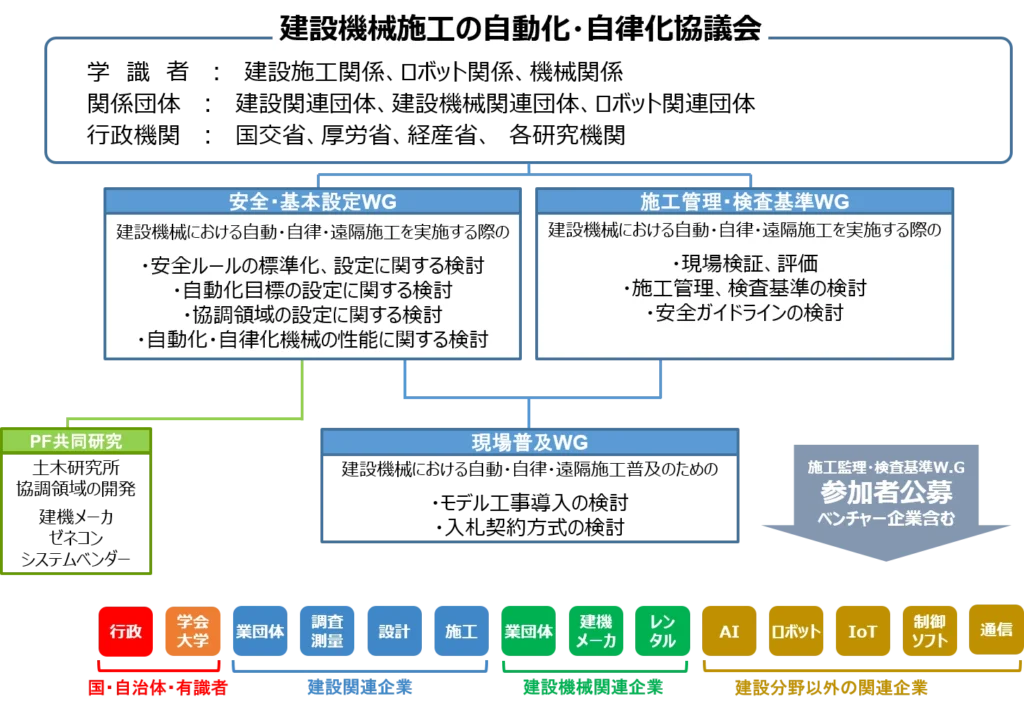
国土交通省は、建設分野の人口減少や高齢化を背景に、建設機械施工の自動化・遠隔化技術の開発・普及を進めており、建設機械施工の自動化・自律化協議会を設置して、安全対策や関連基準の整備を進めています。
自律施工は、「1台の機械を賢くする」段階から、「現場全体をサイバーフィジカルに制御する」段階へ進みつつあります。
自律施工CPSとは何か
自律施工CPSとは、建設現場を現実空間と仮想空間の両方で管理し、施工機械の動作を計画・制御する仕組みです。
現実空間では、重機、作業員、土砂、地形、仮設道路、危険区域、施工進捗が存在します。サイバー空間では、それらをBIM/CIM、点群、地形モデル、施工計画、動作計画、センサー情報として表現します。そして、サイバー空間で作られた計画を、バックホウやクローラーダンプなどの建設機械へ戻して制御します。
| 構成要素 | 役割 | 建設現場での具体例 |
|---|---|---|
| 現場センサー | 現実空間の状態を取得 | LiDAR、カメラ、GNSS、IMU、重機センサー、作業員位置情報 |
| 仮想モデル | 現場をサイバー空間で再現 | BIM/CIM、点群、地形モデル、施工範囲、土量モデル |
| 施工計画 | 何をどの順序で施工するかを定義 | 掘削範囲、運搬ルート、放土場所、作業区画 |
| 動作計画 | 各重機がどう動くかを生成 | 掘削軌道、ダンプ走行経路、停止位置、回避動作 |
| 機械制御 | 実機を動かす | バックホウ操作、クローラーダンプ走行、停止・再開 |
| 安全管理 | 人・重機・危険区域を管理 | 人機分離、立入禁止、干渉回避、非常停止 |
土木研究所の論文検索でも、ROS2-TMS for Constructionの開発として、バックホウ、クローラーダンプ、複数3D LiDARを使い、土砂の掘削・積載・運搬・放土作業の自動化を扱う研究が紹介されています。
CPSのポイントは、重機を単独で動かすのではなく、現場の状態を取得し、仮想モデルで判断し、複数の機械や作業エリアを協調させることです。
なぜ“単体自動化”だけでは足りないのか
建設現場で重機1台を自動化することは大きな進歩です。しかし、現場全体の生産性や安全性を上げるには、単体自動化だけでは限界があります。
たとえば、バックホウが自動で掘削できても、クローラーダンプが適切な位置に来なければ積み込みはできません。ダンプが自動走行できても、仮設道路に資材が置かれたり、作業員が立ち入ったりすれば停止や迂回が必要になります。掘削量が変われば、運搬回数や放土場所も変わります。
| 単体自動化の限界 | CPSで必要になる考え方 |
|---|---|
| 1台の重機だけが自律動作する | 複数の重機を施工計画に合わせて協調させる |
| 機械ごとに制御システムが分かれる | 現場全体の共通モデル・共通制御信号で連携する |
| 現場変化への対応が遅い | センサーで変化を検知し、動作計画を再生成する |
| 人や他機械との干渉を個別対応する | 人機分離、危険区域、干渉回避を統合管理する |
| 施工結果と計画が分断される | 出来形・土量・進捗をモデルへ戻して制御する |
国土交通省は、現在の自動化・自律化・遠隔化技術について、各機器・システムごとの開発や現場ごとの安全対応になっている課題を示し、効率的な開発と普及環境の整備が必要だと整理しています。
つまり、建設機械の自律化は「機械の中の制御」だけでなく、「現場全体の制御設計」へ広げる必要があります。
CPSがつなぐ現場センサー・仮想モデル・機械制御
自律施工CPSでは、現場の情報が一方向に流れるだけではありません。現実空間と仮想空間が循環します。
現場センサーで地形や重機位置を取得し、仮想モデルを更新します。仮想モデル上で施工計画や動作計画を作ります。計画に基づき重機を制御します。施工後の出来形や土量を再びセンサーで確認し、次の計画に反映します。
| データの流れ | 内容 |
|---|---|
| 現実からサイバーへ | LiDAR、点群、GNSS、カメラで現場状態を取得 |
| サイバー空間で計画 | BIM/CIM、地形モデル、土量モデル上で施工計画を更新 |
| 計画から機械制御へ | 掘削、積載、運搬、放土、走行ルートを重機へ送る |
| 施工結果を再取得 | 出来形、土量、地形変化、機械位置を再計測 |
| 次の計画へ反映 | 動作計画を再生成し、施工を継続 |
Development of CPS Platform for Autonomous Constructionでは、ROS2-TMS for ConstructionをCPSとして構成し、クローラーダンプのナビゲーションパッケージや、バックホウとクローラーダンプを用いた検証が紹介されています。
このように、自律施工CPSでは、建設機械は単なる自動運転機械ではなく、現場モデルとつながった実行端末になります。
クローラーダンプとバックホウが示す自律施工の実装イメージ
自律施工CPSの分かりやすい例が、掘削・積載・運搬・放土の一連作業です。
バックホウが土砂を掘削し、クローラーダンプへ積み込みます。クローラーダンプは指定ルートを走行し、放土場所で土砂を降ろします。これを自律化するには、各機械が単独で動くだけでは不十分です。
| 工程 | 必要なCPS機能 |
|---|---|
| 掘削 | 掘削範囲、バケット軌道、土量、地形変化の把握 |
| 積載 | ダンプの停止位置、荷台位置、バックホウとの相対位置制御 |
| 運搬 | 仮設道路、勾配、障害物、他機械との干渉回避 |
| 放土 | 放土位置、土量、地形変化、次工程への反映 |
| 復路 | 次の積載位置への自律走行、待機位置調整 |
土木研究所の研究紹介では、バックホウ・クローラーダンプ・複数3D LiDARを用いた土砂の掘削・積載・運搬・放土作業の自動化が扱われており、単体機械ではなく作業全体をつなぐ方向性が見えます。
このような施工では、ダンプの位置が少しずれるだけで積載効率が落ちます。仮設道路に障害物があればルート再生成が必要です。土砂量が変われば、運搬回数や放土位置も変わります。CPSは、こうした変化を現場全体で吸収するための基盤になります。
BIM/CIM・点群・施工計画の役割
自律施工CPSでは、BIM/CIMや点群は「記録」だけでなく「制御のためのデータ」になります。
従来、BIM/CIMや点群は、設計確認、出来形管理、発注者説明、維持管理のために使われることが多くありました。自律施工では、それらが施工機械の動作計画に使われます。
| データ | 自律施工CPSでの使い方 |
|---|---|
| BIM/CIM | 設計形状、施工範囲、構造物位置、危険区域を定義 |
| 点群 | 現況地形、施工済み形状、土量変化、障害物を把握 |
| 施工計画 | 作業順序、施工区画、運搬ルート、重機配置を設定 |
| 出来形データ | 設計との差分を確認し、次の施工計画へ反映 |
| 安全計画 | 人の立入区域、重機作業範囲、停止条件を設定 |
| 重機ログ | 走行履歴、停止履歴、作業時間、介入履歴を蓄積 |
国土交通省は、i-Construction 2.0の取り組みとして、建設現場のオートメーション化による省人化・生産性向上を進めています。自律施工CPSは、この「現場全体のオートメーション化」を支える考え方と相性があります。
BIM/CIMや点群は、これから「見るための3Dデータ」から「機械が動くための3Dデータ」へ進化していきます。
現場センサーが重要になる理由
自律施工CPSでは、現場の最新状態を取得するセンサーが不可欠です。建設現場は常に変わるため、古いモデルだけを使って重機を動かすことはできません。
| センサー | 取得する情報 | CPSでの役割 |
|---|---|---|
| 3D LiDAR | 地形、障害物、土砂形状、重機周辺 | 現場モデル更新、衝突回避、出来形確認 |
| カメラ | 作業員、重機、資材、標識、現場状況 | 画像認識、安全監視、状況確認 |
| GNSS | 重機位置、移動軌跡 | 自律走行、施工位置管理 |
| IMU | 姿勢、傾き、加速度 | 重機姿勢制御、走行安定性 |
| 重機センサー | バケット位置、油圧、負荷、稼働状態 | 作業制御、異常検知、効率分析 |
| 作業員位置センサー | 人の位置、立入状況 | 人機分離、危険区域管理 |
| 気象・環境センサー | 雨、風、視界、粉じん、温度 | 作業可否判断、安全条件確認 |
センサーの役割は、ロボットに目を持たせることだけではありません。現場全体の「今」をサイバー空間に反映し、施工計画を更新することです。
動作計画の再生成が現場対応力を決める
自律施工CPSでは、一度作った計画通りに機械を動かすだけでは足りません。現場が変化したときに、動作計画を再生成できることが重要です。
たとえば、クローラーダンプの走行ルートに資材が置かれた場合、ルートを変更する必要があります。作業員が危険区域に入った場合は、機械を停止させる必要があります。掘削形状が計画より変化した場合は、バックホウの次の掘削軌道を変える必要があります。
| 現場変化 | 必要な再計画 |
|---|---|
| 走行ルートに障害物がある | 迂回ルート、待機位置、停止条件を再生成 |
| 掘削土量が計画と違う | 掘削範囲、運搬回数、放土位置を更新 |
| 作業員が接近する | 機械停止、警告、作業区域変更 |
| 他の重機が作業範囲に入る | 干渉回避、優先順位、動作タイミング調整 |
| 雨で地盤条件が変わる | 走行速度、ルート、作業可否を見直し |
| センサー異常が発生する | 安全停止、遠隔介入、代替センサー利用 |
自律施工で重要なのは、計画を作ることではなく、現場変化に応じて計画を更新し続けることです。
人との分離管理と安全設計
自律施工CPSで最も重要なのは安全です。建設現場では、人と重機が同じ空間で作業することが多く、完全無人の現場はまだ限定的です。そのため、人機分離、危険区域、停止条件、遠隔介入の設計が必要になります。
国土交通省の建設機械施工の自動化・自律化協議会では、自動施工における安全ルールや機械の機能要件に関する議論が進められています。自動施工を現場へ普及させるには、機械の性能だけでなく、現場内の安全運用ルールが不可欠です。
| 安全設計項目 | 内容 |
|---|---|
| 人機分離 | 作業員と自律機械の作業エリアを分ける |
| 危険区域設定 | 重機旋回範囲、走行ルート、放土エリアを明確化 |
| 立入検知 | 作業員や第三者の侵入をセンサーで検知 |
| 非常停止 | 人の操作、センサー異常、通信断時に安全停止 |
| 遠隔介入 | オペレーターが必要時に操作を引き継ぐ |
| 優先順位制御 | 複数重機の動作順や待機ルールを設定 |
| ログ管理 | 停止、警告、介入、接近履歴を記録 |
自律施工CPSでは、安全もCPSの一部です。現場センサーで人や重機の位置を把握し、仮想モデル上で危険区域を管理し、機械制御へ停止・減速・迂回を反映する必要があります。
遠隔施工との関係
自律施工CPSは、完全自動だけを意味するものではありません。遠隔施工や半自律施工とも組み合わせることが重要です。
すべての判断をAIや機械が行うのではなく、通常作業は自律制御し、異常時や判断が難しい場面では遠隔オペレーターが介入する。これが現実的な導入ステップです。
| 運用形態 | 内容 | 向いている場面 |
|---|---|---|
| 遠隔操作 | 人が離れた場所から機械を操作 | 災害現場、危険区域、初期導入 |
| 半自律施工 | 一部作業を自動化し、人が監視・介入 | 掘削補助、自動走行、積込位置調整 |
| 自律施工 | 機械が計画に基づいて自律動作 | 繰り返し作業、限定区域、土工 |
| CPS型施工 | 現場全体のセンサー・計画・制御を統合 | 複数重機、広域土工、無人化施工 |
国土交通省は、自動化・自律化だけでなく、遠隔施工についても取り組みを進めており、建設現場のオートメーション化に向けた枠組みを整備しています。
自律施工CPSでは、人が不要になるのではなく、人が現場全体を監視し、必要時に介入する役割へ変わります。
KPIで見る自律施工CPSの効果
自律施工CPSの導入効果は、「自動で動いたかどうか」ではなく、施工全体の安定性、安全性、生産性をKPIで評価する必要があります。
| KPI項目 | 内容 | 改善に使えるポイント |
|---|---|---|
| 遠隔介入率 | 自律施工中に人が介入した割合 | 自律性と例外対応力の評価 |
| 施工精度 | 設計値に対する出来形精度 | 点群・BIM/CIMとの差分確認 |
| 機械停止時間 | 障害物、通信断、安全停止による停止時間 | センサー・ルート・安全設計の改善 |
| 動作計画の再生成回数 | ルートや作業計画を再生成した回数 | 現場変化への適応力評価 |
| 重機間干渉回避件数 | 重機同士の接近・干渉を回避した件数 | 複数機械制御の安全性確認 |
| 人との分離管理率 | 作業員と自律機械の分離が維持された割合 | 安全運用の確認 |
| 土量処理効率 | 単位時間あたりの掘削・運搬・放土量 | 生産性評価 |
| ルート逸脱件数 | 計画ルートから外れた回数 | 自律走行精度の改善 |
| センサー異常件数 | LiDAR、GNSS、カメラなどの異常発生数 | 機器信頼性の改善 |
| 出来形更新頻度 | 現場モデルを更新した頻度 | CPSのリアルタイム性評価 |
特に重要なのは、遠隔介入率と機械停止時間です。自律施工は、完全に止まらずに動くことよりも、止まるべきときに安全に止まり、再開できることが重要です。
建設会社・重機メーカー・発注者での活用イメージ
自律施工CPSは、建設会社だけでなく、重機メーカー、発注者、測量会社、ソフトウェア事業者に関係するテーマです。
| 関係者 | 活用イメージ |
|---|---|
| 建設会社 | 土工、造成、災害復旧、危険区域施工の省人化と安全性向上 |
| 重機メーカー | 自律制御、遠隔操作、共通制御信号、機械安全機能の開発 |
| 発注者 | 施工精度、安全管理、進捗、出来形データの確認 |
| 測量会社 | 点群、地形モデル、出来形データをCPSへ提供 |
| ソフトウェア事業者 | BIM/CIM、施工計画、動作計画、ロボット制御を連携 |
| 安全管理者 | 人機分離、危険区域、停止条件、介入ログを管理 |
自律施工CPSは、機械単体の話ではありません。建設会社、メーカー、発注者、測量・データ事業者が、現場全体の制御設計を共有する必要があります。
導入時に注意すべきポイント
現場全体の設計が必要になる
自律施工CPSでは、重機だけを導入しても効果は限定的です。施工範囲、作業員動線、重機ルート、仮設道路、資材置き場、通信環境、危険区域を含めて、現場全体を設計する必要があります。
センサーとモデルのズレを管理する
点群やBIM/CIMモデルが現場の最新状態とずれていると、誤った動作計画につながります。CPSでは、現場センサーでモデルを更新し、モデルの鮮度を管理することが重要です。
通信断やセンサー異常を前提にする
建設現場では、通信が不安定になることがあります。粉じん、雨、振動、死角によってセンサー精度が低下することもあります。自律施工では、通信断やセンサー異常時に安全側へ停止する設計が不可欠です。
人との混在を軽視しない
完全無人化された区域であれば制御は比較的単純になります。しかし、多くの現場では人と機械が混在します。人機分離、立入管理、警告、停止条件を現場ルールとして整備する必要があります。
現場ログを改善に使う
停止履歴、遠隔介入履歴、ルート変更、干渉回避、センサー異常、出来形差分は、次の施工計画や機械制御の改善に使えます。ログを残さない自律施工は、改善サイクルを回しにくくなります。
現場で使える自律施工CPS導入チェックリスト
- 対象作業は掘削、積載、運搬、放土、敷き均し、締固めのどれか
- 対象機械はバックホウ、クローラーダンプ、ブルドーザー、ローラーのどれか
- BIM/CIMや点群で施工範囲と地形をモデル化しているか
- 現場センサーで重機位置、地形、障害物、人の位置を取得できるか
- 動作計画を現場変化に応じて再生成できるか
- 重機間の干渉回避ルールを決めているか
- 人機分離区域と立入禁止区域を設定しているか
- 通信断、センサー異常、GNSS不良時の停止条件を決めているか
- 遠隔介入の担当者、権限、手順を決めているか
- 施工結果を点群や出来形データで再計測するか
- 遠隔介入率、施工精度、機械停止時間をKPIにするか
- 停止ログや介入ログを次回施工計画に反映するか
このチェックリストの目的は、自動で重機を動かすこと自体ではありません。現場全体を安全に制御し、施工計画と実施工の差分を減らし、機械・人・データが連携する施工システムを作ることです。
まとめ
自律施工は、重機1台の自動化だけで終わるものではありません。バックホウやクローラーダンプが自動で動くだけでなく、現場センサー、BIM/CIM、点群、施工計画、動作計画、重機制御、安全管理をつなぐCPSとして設計することが重要です。
日本でも、ROS2-TMS for Constructionのような土工現場用CPSプラットフォームの研究が進んでおり、バックホウ、クローラーダンプ、複数3D LiDARを用いた掘削・積載・運搬・放土作業の自動化が検証されています。
今後のKPIは、遠隔介入率、施工精度、機械停止時間、動作計画の再生成回数、重機間の干渉回避、人との分離管理へ移っていきます。建設機械は、単体で自律化する段階から、現場全体のサイバーフィジカル制御の一部として動く段階へ進化していくでしょう。




